DESIGN
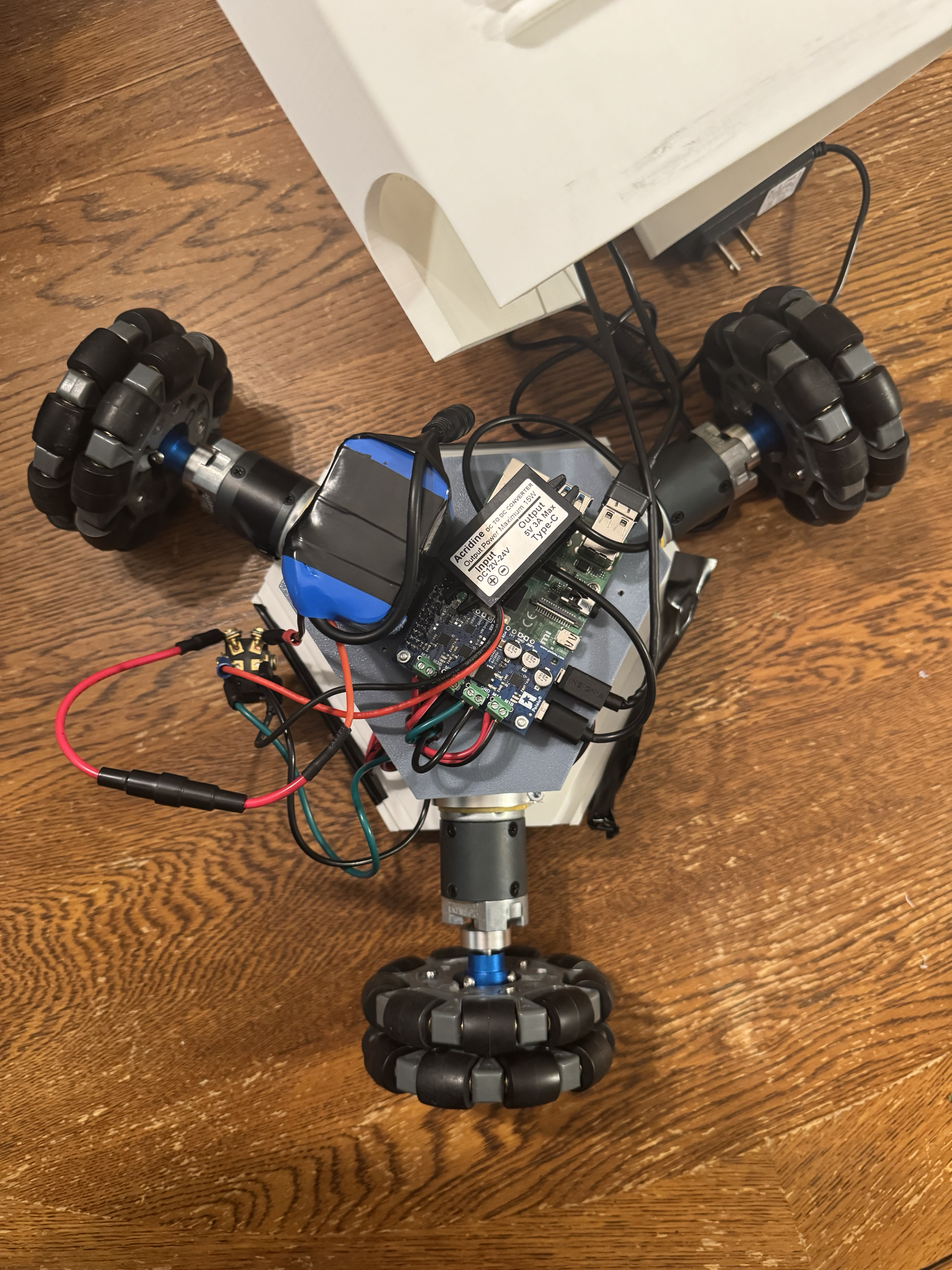
HomeOur final design includes a Omni-Directional robot that has three wheels on a triangular base. The shell keeps that triangular shape for the chassis and has a dome attatched to allow patients to grab onto the device when using.The shell was 3D printed with PLA material for ease of manufacturing and to help keep the device lightweight per the client's request. The inside of the robot includes a raspberry pi 4, motoron motor controller, three motors, a 6 Amp hour battery, and a buck converter. The bottom of the robot has a 1/4" steel plate and the bearing mounts are made with the same material for additional support on the motor shafts. For the interface the design includes a 7" lcd touch screen that will eventually be able to provide patients with exercises to perform in future development.
.png)
.png)
.png)